

隨著近幾年交通事故和交通擁堵對傳統(tǒng)汽車工業(yè)的強烈沖擊,同時在計算機技術和互聯(lián)網(wǎng)技術的迅速發(fā)展的加持下,自動駕駛技術成為了各國優(yōu)先發(fā)展的前沿技術。包括傳統(tǒng)車企和以谷歌、華為、特斯拉等為代表的的新興科技巨頭都已經(jīng)發(fā)展出了自己的自動駕駛技術和自動駕駛整車等。
圖源:汽車電子網(wǎng)
在國家政策和市場的積極引導下,全球的自動駕駛技術已經(jīng)得到了極大地發(fā)展。但是近日來,國內(nèi)發(fā)生的多起具有自動駕駛功能的汽車車禍又一次將自動駕駛技術推上了輿論的風口浪尖。
那么作為目前代表兩大主流自動駕駛技術的企業(yè)—華為和特斯拉,它們各自都是通過怎樣的技術路線實現(xiàn)自動駕駛的呢?它們的技術又都有何利弊呢?
特斯拉:純視覺方案
同人駕駛汽車的過程類似,自動駕駛系統(tǒng)可以分為三大部分:感知系統(tǒng)、決策系統(tǒng)和執(zhí)行系統(tǒng)。感知系統(tǒng)通過各種技術手段對駕駛過程中的各種路況信息進行捕獲;決策系統(tǒng)通過對感知系統(tǒng)獲得的全部信息進行研判做出相應的決策;執(zhí)行系統(tǒng)將將接收到的決策落實行動。目前不同的自動駕駛技術的主要區(qū)別就是在于其感知系統(tǒng)的差異。
像特斯拉、極氪、百度都使用的是純視覺感知方案,其中特斯拉更是視覺派的堅實擁護者。目前這種投入實際工業(yè)應用的自動駕駛的技術路線可以被稱為“純視覺”方案。
感知系統(tǒng)捕獲的大量圖像視覺信息將通過基于神經(jīng)網(wǎng)絡的計算機視覺識別系統(tǒng)對圖像中所含的信息進行分類識別,識別到的有益信息將傳遞到?jīng)Q策系統(tǒng)來做出決策后來干預車輛的運行狀態(tài)。為了提高整體駕駛過程中的安全冗余,車輛會在行駛過程中也會同時收集相關的行車信息。

視覺感知方案硬件對比
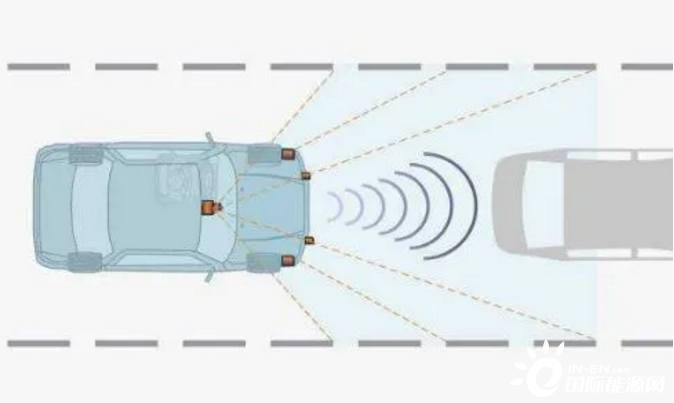
特斯拉的感知系統(tǒng)通過多種傳感器融合,將傳感器捕獲的信息通過人工智能算法進行分析和解算,后通過車載顯示設備將相關的信息呈現(xiàn)給駕駛員。該系統(tǒng)的硬件設備主要包括覆蓋車身周圍360度視野的8個攝像頭,對周圍的最遠監(jiān)控距離可達250m。同時為了完善視覺感知系統(tǒng)還安裝了12個超聲波傳感器用來探測障礙物距離。前置的雷達通過冗余波長來保證汽車在極端惡劣條件下的探測能力。
而在以特斯拉為代表的采取“純視覺”的自動駕駛方案中,圖像語義分割(ISS)是其中最重要的一項核心技術。圖像語義分割在自動駕駛系統(tǒng)中主要用來進行行車路線和街道的識別和理解,是視覺自動駕駛方案的技術基石。就是將感知系統(tǒng)捕獲到的圖像按照其不同的含義、屬性等進行分類,自動將不同類型的圖像加以區(qū)分并識別。
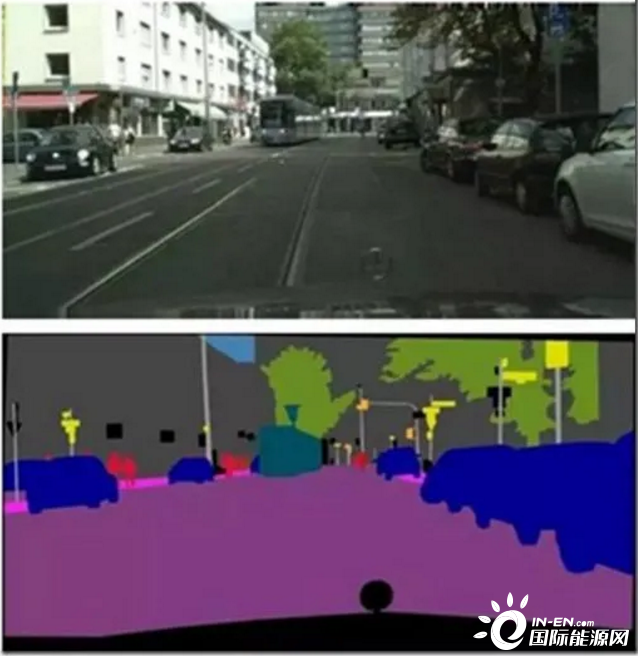
車載攝像頭圖像語義分割對比
特斯拉目前規(guī)模化應用的自動輔助駕駛系統(tǒng)是Tesla Autopilot技術,其應用HydraNets骨干架構將48個不同類型的神經(jīng)網(wǎng)絡在計算過程中共享主干。通過基于Python語言的PyTorth學習框架來進行神經(jīng)網(wǎng)絡的訓練,每個攝像頭捕獲的圖像都通過單個神經(jīng)網(wǎng)絡進行訓練處理,隨后將所有的內(nèi)容全部整合到骨干神經(jīng)網(wǎng)絡中。其整體的算法循環(huán)為:感知系統(tǒng)收集圖像數(shù)據(jù)、車載系統(tǒng)標記數(shù)據(jù)、訓練系統(tǒng)進行網(wǎng)絡訓練。
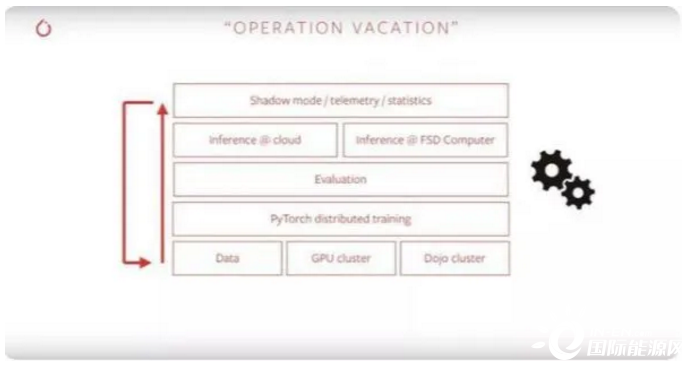
AutoPilot系統(tǒng)工作流程/自動駕駛之家
特斯拉的輔助和自動駕駛系統(tǒng)最大的優(yōu)勢就是其在全球目前巨大的整車保有量,即通過分布于全球的大量行車數(shù)據(jù),不斷地對駕駛模型進行強化、訓練,以期覆蓋全部的應用場景和各種復雜工況,從而達到真正意義上的自動駕駛。
華為:視覺算法+激光雷達
類似于人在駕駛過程中,人眼在極端復雜的路況、光線等的作用下,往往容易對行車路線、距離等出現(xiàn)錯誤判斷。“純視覺”的自動駕駛方案也容易發(fā)生類似的情況,計算機視覺算法目前雖然已經(jīng)得到了極大地發(fā)展,但是其對于邊界情況的處理能力仍然比較有限。正是因為視覺算法目前的局限性,越來越多的提供汽車自動駕駛方案解決方案的廠商都選擇了“視覺算法+激光雷達”的解決方案。
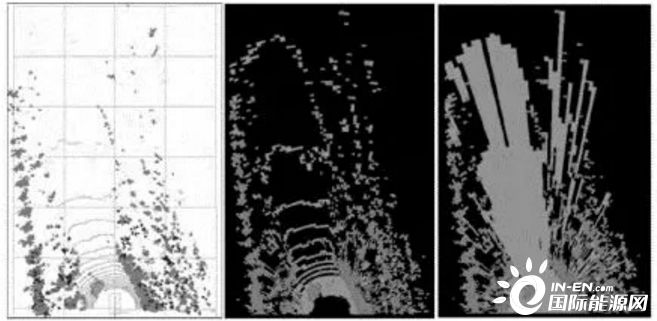
圖片激光雷達的環(huán)境感知點圖、柵格圖和可行駛區(qū)域檢測圖 圖源:黃武陵.激光雷達在無人駕駛環(huán)境感知中的應用
而目前阻礙激光雷達大規(guī)模應用于自動駕駛汽車系統(tǒng)中的主要原因就是一個字“貴”。據(jù)悉市場上L4級別無人駕駛車輛所搭載的64線激光雷達的價格可達8-10萬美元一臺,這也是特斯拉公司CEO馬斯克對激光雷達嗤之以鼻的原因。

激光雷達方案硬件對比
華為就是采用“視覺算法+激光雷達”自動駕駛方案的代表企業(yè)。華為在其自動駕駛系統(tǒng)中搭載了100線車規(guī)級的激光雷達,同時也安裝了微波雷達、RYYB傳感器和視覺分析系統(tǒng)來達到更好的行車環(huán)境識別效果。同時華為已經(jīng)將自研的激光雷達成本控制在了200美元之內(nèi),還計劃在兩年之內(nèi)將成本降低到100美元之內(nèi)。其在車載激光雷達的成本和系統(tǒng)環(huán)境感知質(zhì)量之中找到了平衡點,同時車道級的導航系統(tǒng)也會使其自動駕駛系統(tǒng)的安全性再上一個臺階。
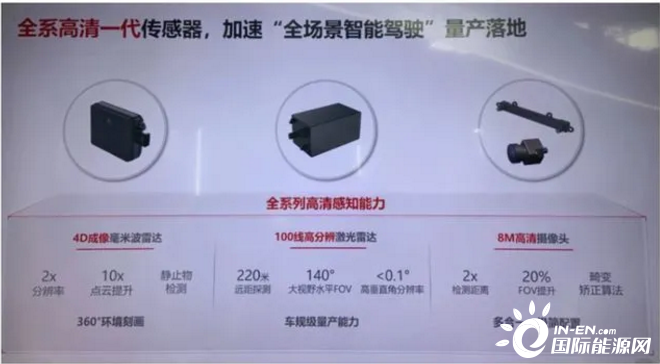
國產(chǎn)自動駕駛傳感器系列產(chǎn)品/EET China
結語:
以華為和特斯拉為代表的自動駕駛技術方案對比,其實就是在現(xiàn)有的技術條件下,自動駕駛功能的完成度和系統(tǒng)經(jīng)濟性之間的比拼。
以特斯拉為代表的的純視覺派為控制自動駕駛系統(tǒng)成本,只使用計算機視覺技術以期實現(xiàn)L4以上級別的自動駕駛。而華為則利用自身在通信技術方面的巨大優(yōu)勢和深厚積淀,將車載激光雷達變成了“白菜價”,其打造的“視覺算法+激光雷達”的自動駕駛技術相對來說有著更高的安全冗余。
在今后的汽車自動駕駛技術上,各個企業(yè)又將走向何種技術方向呢?在何時才能實現(xiàn)真正意義上的自動駕駛呢?我們也將拭目以待。





 正在加載...
正在加載...


